MULTICOPTERに挑戦(multiwii)2015/04/28up~ QUADCOPTERの製作記事を書いていきます・・・書き加えや訂正など随時行っています2015/05/28 Bluetoothモジュールの取り付け T-MOTOR AIRGEAR 350でQUADCOPTERの製作 TRICOPTERを製作しましたが色々な不具合があり安心して飛ばすことが出来るQUADCOPTERを製作することにしました。
TRICOPTER製作ではモーター、ESC、プロペラの選定に迷いましたがT-MOTOR AIRGEAR 350 COMBO SETは3点がセットなのでマッチングに迷う必要がありません。
また、TRICOPTERで起こったほとんどの問題点を解決できます。
TRICOPTERを製作しましたが色々な不具合があり安心して飛ばすことが出来るQUADCOPTERを製作することにしました。
TRICOPTER製作ではモーター、ESC、プロペラの選定に迷いましたがT-MOTOR AIRGEAR 350 COMBO SETは3点がセットなのでマッチングに迷う必要がありません。
また、TRICOPTERで起こったほとんどの問題点を解決できます。E-MAXモーターは品質が悪く、プロペラアダプターを必要とします。E-MAXのプロペラアダプターも品質が悪いので不適です。 コレット式のプロペラアダプターは飛行中外れると墜落するので使いたくはありません。 プロペラの品質やモーターとのマッチングは購入して使って見なければ分からないので無駄なプロペラ購入をしてしまいます。 ESCはマルチコプター用に設計されたものを使うほうが良いと思います。MULTISTARは一見マルチコプター用のESCと勘違いさせられますがデフォルトは飛行機用の設定となっているので マルチコプターに使うにはプログラマーが必要です。 TRICOPTERはサーボでテールをコントロールするのでこのサーボを高級なものを使わないとすぐに故障の原因となりますが、 サーボを使わないQUADCOPTERは信頼性が高いものとなります。 QUADスペック ■フレーム 自作木製 ■モーター AIR 2213/920KV ■ESC AIR 20A(NO BEC) ■プロペラ T9545 9.5×4.5IN ■フライトコントローラー CRIUS Multiwii SE V2.0 firmware multiwii Ver 2.2 ■受信機 FrSKY DELTA-8 ■送信機 FUTABA FF8 & FrSKY DFT ■CRIUS GPS CN-06 V2.0&CRIUS I2C NAV MODULE ■電飾用LED ■飛行重量 試作2号機 機体重量692g+バッテリー重量176g 合計868g(2015/4/28 現在) <AIRGEAR 350 COMBO SET 内容物> ●MOTOR:AIR 2213/920KV 正転用モーター、逆転用モーター(プロペラシャフトネジ部が逆ネジ)が各2個 合計4個のセットです。モーターには回転方向を示すクサビ型のマーク" << "があり、 時計方向回転用のモーターにはプロペラシャフト上に白ドットのマーキングがあり識別が容易に出来るようになっています。 プロペラ・シャフト径:6mm 、シャフト長:12mm(ネジ部:7mm) Motor Specifications KV..............................920 Configuration...................9N12P Stator Diameter.................22mm Stator Length...................13mm Shaft Diameter..................4mm Motor Dimensions(Dia.*Len)......Φ27.5×30mm Weight (g)......................54g ldle current(10)@10v(A).........0.5A No.of Cells(Lipo)...............3-4S Max Continuous current(A)180S...18A Max Continuous Power(W)180S.....230W Max. efficiency current.........(3-10A)>83% internal resistance.............132mΩ ●プロペラ: T9545 9.5×4.5IN 正逆2SETで合計4本入り、逆回転用はバレット・ナット部に白色の弧でマーキングが示されています。白ドットのマークのあるモーターと組み合わせて使用するので容易に組みつけができます。 プロペラハブの厚さは6mmで市販されている通常のプロペラより薄くできています。 セルフロック式のプロペラなのでモーターが廻れば締め付けられるので緩む心配がありません。 逆回転用はバレット・ナットは逆ネジです。 プラスチック製のプロペラなのでプロペラバランスはあまり良くありませんでした。傾向としては正ピッチのプロペラは大きめのバランス用テープを貼る必要がありました。 ●ESC:AIR 20A (3-4S LIPO) NO BECですがOPTOとの記載はありません。バッテリー側のコネクターは付属していません。 20AのESCですがずいぶん小さく、バッテリー側の配線は他のメーカー品の20A用と比べると細い電線を使用しています。 セットのプロペラと使う分にはこのサイズで良いのかもしれません。 ホームページ記載内容 Simplified and designed for multi-rotors w/o BEC Firmware optimaized for 600Hz refresh rate Ultra-low internal resistance and anti-jamming design Optimized throttle response Weight minimized & Structure compact 設定項目は2つ 1、スロットルレンジキャリブレーション:スロットルHIで接続し、BEEP音が2回(BEEP,BEEP)鳴ったら戻す。3秒後設定完了。 2、タイミングの設定:デフォルトはMID、MID又はHIを設定することができます。 通常はスロットルレンジキャリブレーションだけすれば使用できます。 プロテクション 1、スタートアッププロテクション 2、オーバーロードプロテクション 3、スロットルシグナルロスプロテクション ●予備部品 モーターシャフト止め用ワッシャー、クリップ 各2個 フレームの製作 試作1号機(FPV風) 


TRICOPTERで使った12㎜の角棒(コメリ 白木材 910mm×12mm×12mm 2本)と3mmシナベニヤで製作しました。 プロペラ径が9.5インチなので間隔を取るためモーター軸間距離は約540mmとしました。 FPV風の機体とするため前側はの角度は120度とし、後ろ側は通常の90度としました。胴体が少し長くなるのでねじれ強度があるかちょっと心配です。 重たくならないようになるべく補強をせずに組み立てることにしました。 形状が少し複雑になったのでベニヤを切り出すのが少し面倒でした。 試作2号機(X型) 


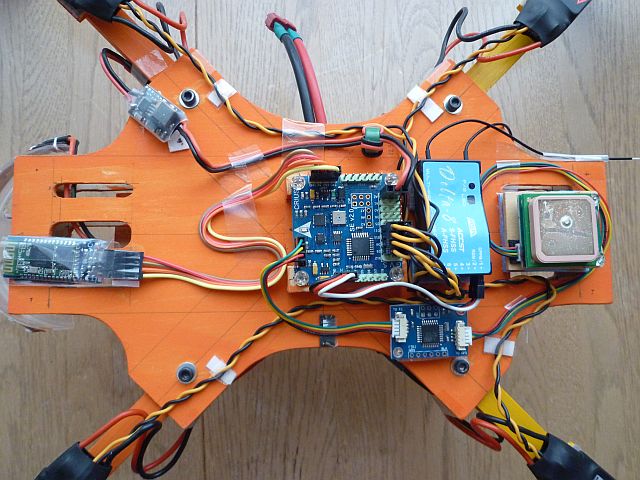
モーター軸間距離は1号機と同様に約540mmとしました。 2本の角棒に溝を切りクロスして2枚の3mmベニヤで挟みました。下面のベニヤには電源配線を通すための穴を開けています。 バッテリー取り付けようの板は4mm厚の棒材で浮かせています。配線を通すために合計7mmの隙間ができています。 足は3mmのベニヤで製作しました。 バッテリー電源の配線 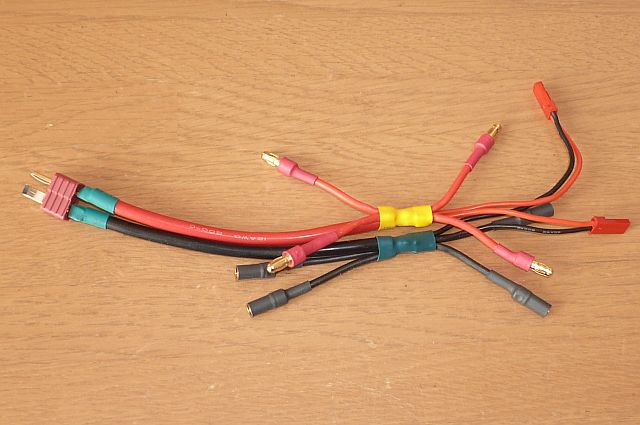 今回はキチンとシリコンワイヤーで製作しました。バッテリーを接続するワイヤーはAWG12です。これは使用できなくなったバッテリーから取った物です。
ESC側のコネクターは3.5mmを取り付けました。UBECとLEDの電源用にコネクターを2個別に取り付けています。
今回はキチンとシリコンワイヤーで製作しました。バッテリーを接続するワイヤーはAWG12です。これは使用できなくなったバッテリーから取った物です。
ESC側のコネクターは3.5mmを取り付けました。UBECとLEDの電源用にコネクターを2個別に取り付けています。
モーターとESCの取付 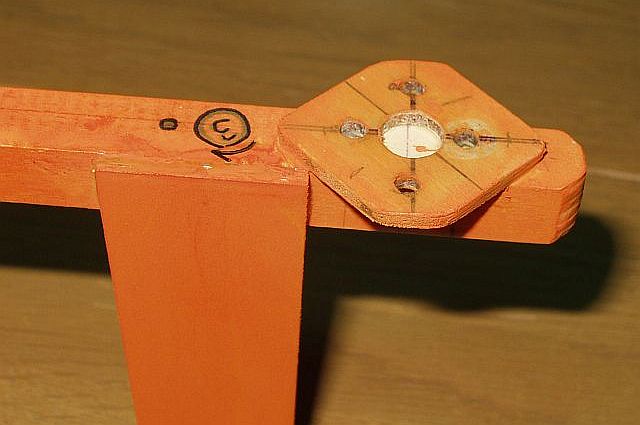
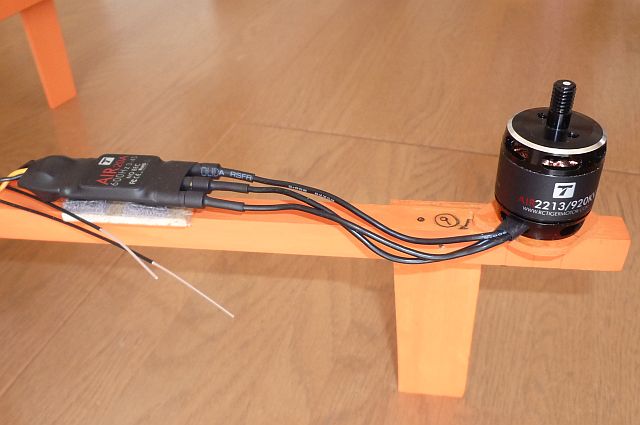
ESCのマウントはバルサ材を角材の上面に接着剤で貼り付けています。ESCはベルクロテープで取り付けています。 モーター結線とESCの接続は正回転ではモーターからの配線を並び順に接続することで正回転になります。 逆回転用の白いマークのあるモーターは配線を2本入れ替えてESCに接続すれば逆回転になります。 フライトコントローラー(FC)の取付
MULTIWII FLIGHT CONTROLLER(MWFC)は2mmの航空ベニヤでマウントプレートを作りバルサのマウントにプラスチックネジで留め、
マウントプレートをスポンジ両面テープで固定しています。取り付け位置は後ろ側アームの交差点(モーター間の中心点)になるようにします。 センサーがなるべく中心に来るようにマウントの位置を決めました。 受信機のCPPM設定と取り付け  今回、CPPMを出力できるFrSKY DELTA-8受信機を使うことにしました。この受信機はFrSKYは勿論、FutabaのS-FHSS、HItechのA-FHSSなどの受信機として使うことができるマルチ受信機です。
multiwii SE v2.0コントローラーでは通常接続で6CHしか使えませんがCPPMを使うこと8CHが使えます。
今回、CPPMを出力できるFrSKY DELTA-8受信機を使うことにしました。この受信機はFrSKYは勿論、FutabaのS-FHSS、HItechのA-FHSSなどの受信機として使うことができるマルチ受信機です。
multiwii SE v2.0コントローラーでは通常接続で6CHしか使えませんがCPPMを使うこと8CHが使えます。初めて使うのでまずはCPPMを使わずFrSKYの通常の受信機としてバインドして正常に作動するか確認し、この状態で個々のESCのスロットルレンジのキャリブレーションを行ないました。 送信機の設定はTRICOPTERを製作したときすんでいるので同じFrSKYの受信機を使用するのでそのままでもほとんど問題ないだろうということでそのままおこないました。 ESCのキャリブレーション後、受信機をCPPM出力に設定しなおします。 設定は簡単でシグナルピンの3番と4番をジャンパープラグで接続して、バインドするだけです。これで1番ピンからCPPMが出力されるようになります。 フライトコントローラーに接続しWinGUIで出力を確認して8CH分すべてが正常か確認しました。受信機とフライトコントローラーが1本のワイヤーだけでシンプルに接続できてスッキリしました。 ESCのスロットルのキャリブレーション
送信機の設定、トラベルアジャスト(min=1000μs,hi=2000μs)を終わらせてから、ESCのキャリブレーションを行います。勿論、安全のため、プロペラは外して行います。アンプを受信機のスロットルCHにつないで1個づつ、キャリブレーションを行う方法です。この方法が一番確実に設定を行うことができます。 スロットルのキャリブレーション方法は他のメーカーのアンプと同様にスロットルフルハイで電源を接続してアイドルに戻す方法でキャリブレーションを行ないます。 BEEP音が2回(BEEP,BEEP)鳴ったらスロットルを戻し、3秒後設定完了です。 UBECの取付 
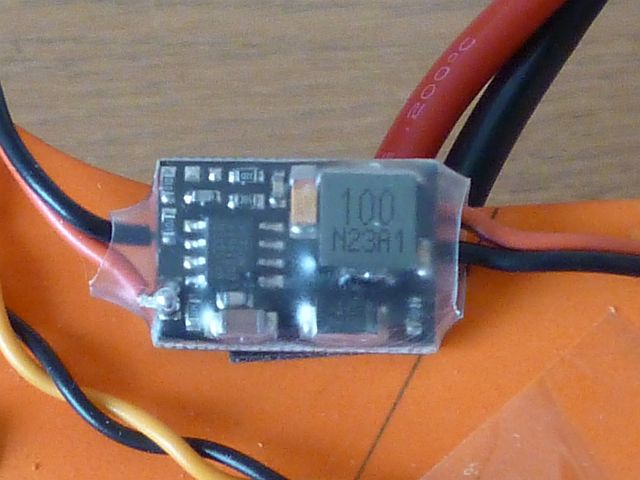 使用したESCはBECがないので外付けのUBECを使用することにしました。TINAXのUBEC 6S3A5Vです。取扱説明書がまったく付属しません。
入力リポ2セルから6セル、出力5V、3Aです。
680円だったのでつい買ってしまいましたがあまりに小さいので本当に3アンペアも流すことが出来るのか心配です。QUADに使用するのでそんなに電流を食わないと思うので大丈夫だと思いますが。
ノイズが心配なので取付位置はなるべくフライトコントローラーから離れるようにしました。
使用したESCはBECがないので外付けのUBECを使用することにしました。TINAXのUBEC 6S3A5Vです。取扱説明書がまったく付属しません。
入力リポ2セルから6セル、出力5V、3Aです。
680円だったのでつい買ってしまいましたがあまりに小さいので本当に3アンペアも流すことが出来るのか心配です。QUADに使用するのでそんなに電流を食わないと思うので大丈夫だと思いますが。
ノイズが心配なので取付位置はなるべくフライトコントローラーから離れるようにしました。config.hの設定 現在、multiwiiのバージョンは2.4がすでに発表されていますが2.4はメモリー容量の関係でmultiwii se v2.0に入れることが出来ないので使い慣れたmultiwii ver2.2にしました。 デフォルトから下記の行を変更します。 #define QUADX #define HK_MultiWii_SE_V2 // Hobbyking board with MPU6050 + HMC5883L + BMP085 //#define I2C_SPEED 100000L //100kHz normal mode, this value must be used for a genuine WMP #define I2C_SPEED 400000L //400kHz fast mode, it works only with some WMP clones #define MPU6050_LPF_42HZ------とりあえずラジコン技術どおりに選びました モーターARMの方法の設定変更 tricopterで設定したと同様にスロットル・スティックでARMにすることにしました。ROLL行も有効にしました。 #define ALLOW_ARM_DISARM_VIA_TX_ROLL CPPMの設定 フタバ製のプロポを使うのでPPM Sum Reciverの項目でfutabaを選び有効にする。 /**************************** PPM Sum Reciver ***********************************/ #define SERIAL_SUM_PPM ROLL,PITCH,THROTTLE,YAW,AUX1,AUX2,AUX3,AUX4,8,9,10,11 //For Robe/Hitec/Futaba I2C GPSの設定 //#define GPS_BAUD 115200 ------シリアル接続の設定なので無効にします #define I2C_GPS #define MAG_DECLINIATION -7.1f ------私の地域の磁気偏角値です、 http://magnetic-declination.com/で調べます。 千葉や東京などは"-7f"ぐらいの値を入れます WinGUIで送信機の設定 今回、TRICOPTERで設定したデーターをコピーしてQUADCOPTER用のモデルを作成しました。 CPPM出力の各チャンネルの数値確認と7CH,8CHの設定です。 コントローラーをwinGUIに接続して各CHの数値を確認しましたが大きなずれはありませんでした。ただし、スロットルを上げたとき4つのモーター出力に少し差があったのでニュートラル、 、最小、最大値がなるべく1500,1000,2000丁度になるように送信機を調整しました。調整後はスロットル操作でモーター出力値もほぼ等しくなりました。 AUX1、AUX2、AUX3、AUX4の割り当て 6ch、7ch、8chはボリュームツマミなのでミキシングを設定してSWでAUX1,AUX2,AUX3,AUX4を切り替えることが出来るようにしました。ミキシング設定方法はFF8の設定をお読みください。 SWを操作して必要によりリバース設定、3ポジションSWの設定、トラベル・アジャスト(エンドポイント)の調整を行います。モーターのARMはスティック操作として、AUX1に3ポジションSW(CH6)、AUX2に2ポジションSW (5CH)、AUX3に3ポジションSW(7CH)、AUX4に2ポジションSW(8CH)を使いました。 プロペラのバランス調整 プロペラのバランスを調整せずに取り付けてテストしてみました。正ピッチのプロペラは回転をあまり上げないうちから振動が出ます。 だいぶバランスが悪いようです。逆ピッチのプロペラは余り振動が出ずに回転を上げることができました。 テープを貼ってバランスを調整しましたが正ピッチのプロペラはテープの貼る量が多く、左右のバランスを取っても上下バランスが悪くあまり良くありません。 実際に取り付けての振動を見ても正ピッチのプロペラは振動が多くプロペラ回転音も良くありませんが逆ピッチのプロペラはほとんど振動はありません。 正ピッチのプロペラはバランスが悪く調整が難しくあまりよくありません、もう少しバランスの良いプロペラを作って欲しいものです。 

LEDライトの取付  視認性を良くするため、前方に以前TRICOPTERで使っていた赤色LEDライトを取り付けました。丸いプラスチック製の容器をカットしてそれに貼り付けています。
曇り空で飛ばしましたが半円形に貼り付けているので前方1箇所でも視認性は良い物となっています。
視認性を良くするため、前方に以前TRICOPTERで使っていた赤色LEDライトを取り付けました。丸いプラスチック製の容器をカットしてそれに貼り付けています。
曇り空で飛ばしましたが半円形に貼り付けているので前方1箇所でも視認性は良い物となっています。バッテリーの保護カバー  バッテリーがむき出しで下面に搭載されているので墜落時の保護のため、バッテリーに保護カバーを付けることにしました。
バッテリーがむき出しで下面に搭載されているので墜落時の保護のため、バッテリーに保護カバーを付けることにしました。
フライト 試作1号機  初フライトは少し風がありベストな状態でのテストになりませんでしたが、風が弱い日は少ないのでこれで飛ばしづらいならあまりよい機体とは言えません。
マニュアルでのコントロールはあまり問題がなく飛ばすことができました。胴体が長いので向きを把握しやすいので見やすいと感じました。
GPS HOLDを試しましたが上下動が大きく、だんだん激しくなる傾向がありました。GPS RTHでは風下からRTHにしましたが高度を下げてきて向かってくるので直ぐにマニュアルに切り替えました。
風のない日ならよいかもしれませんが自動操縦は不安定なのでこの機体は没にしました。
初フライトは少し風がありベストな状態でのテストになりませんでしたが、風が弱い日は少ないのでこれで飛ばしづらいならあまりよい機体とは言えません。
マニュアルでのコントロールはあまり問題がなく飛ばすことができました。胴体が長いので向きを把握しやすいので見やすいと感じました。
GPS HOLDを試しましたが上下動が大きく、だんだん激しくなる傾向がありました。GPS RTHでは風下からRTHにしましたが高度を下げてきて向かってくるので直ぐにマニュアルに切り替えました。
風のない日ならよいかもしれませんが自動操縦は不安定なのでこの機体は没にしました。
試作2号機  風が弱いときにテストすることができました。バッテリーは2200mAhです。マニュアルフライトでは問題のない操作感です。
視認性はLEDライトを点けているので前方が直ぐ分かるのでLEDをたよりに飛ばすことができます。
GPS holdを試したところ上下動はありますが比較的安定した上下動でした。RTHも試作1号機のような挙動はなかったので良しとします。
風が弱いときにテストすることができました。バッテリーは2200mAhです。マニュアルフライトでは問題のない操作感です。
視認性はLEDライトを点けているので前方が直ぐ分かるのでLEDをたよりに飛ばすことができます。
GPS holdを試したところ上下動はありますが比較的安定した上下動でした。RTHも試作1号機のような挙動はなかったので良しとします。風の少し強い日に3300mAhのバッテリーでフライトしてみました。重くなったせいかGPS holdでは試作1号機と同様な上下動がだんだん大きくなる傾向がありましたが、 2200mAhのバッテリーでは大きくなっていくような傾向はあまりありませんでした。PIDを調整すれば良くなると思いますが普段2200mAhのバッテリーを 使用するのでとりあえずこのまま使用します。 わたしはヘリコプターを飛ばしていたので通常、ジャイロのみで操縦しています。GPS holdは手を離して何か使用とする時(写真撮影など)に使っています。 RTHは機体が離れて操縦がむづかしくなったときや戻す操縦が面倒になった時に使用しています。自分の近くへ戻ってくるだけでokです。 マルチコプターを操縦していつも思うのですが、ヘリを飛ばしていたころ3軸ジャイロがそのころからあれば、操縦が楽だっただろうなと思っています。 マルチコプターはヘリの操縦に比べなんと楽なものです。 飛行写真 

Bluetoothモジュールの取り付け 2015/5/28 
 PIDの設定をするのに飛行場でPCと電線で繋ぐのは面倒なのでBluetoothモジュールを購入することにしました。
Bluetoothモジュールは汎用のモジュール(EGBT-046S-P)で秋葉原の通販 aitendo から購入しました。
デフォルトのボーレートは9600bpsなのでこのままではmultiwiiに使用できません。
ネットで検索すると設定方法のビデオがありました。ビデオに従い何とか設定できました。
PIDの設定をするのに飛行場でPCと電線で繋ぐのは面倒なのでBluetoothモジュールを購入することにしました。
Bluetoothモジュールは汎用のモジュール(EGBT-046S-P)で秋葉原の通販 aitendo から購入しました。
デフォルトのボーレートは9600bpsなのでこのままではmultiwiiに使用できません。
ネットで検索すると設定方法のビデオがありました。ビデオに従い何とか設定できました。娘のお下がりのスマホにbluetoothで接続です。 使い慣れないのでスマホの設定からbluetoothを使用できるようにする方法がよくわかりません。 QUADcopterにはbluetoothモジュールを接続して電源を入れてありますが、 bluetoothの設定画面を開いてもmultiwiiのbluetoothモジュールの名前が出てきません。娘に検索してもらい私が付けたbluetoothモジュールの名前"quad"が出てきました。 これで使えそうだと思いスマホのEZ GUIアプリを開きconnectボタンをタップしますがエラーがでてすぐにdisconnectされます。MAC ADDRESSがどうのという内容です。 ネットで調べるとアプリに設定項目があるようです。EZ GUIは見づらいので設定できる場所がどこにあるのかわかりません。 hobbyrobotfactoryさんのホームーページを見てやっと設定することができました。 EZ-GUIの使い方が良く分からないのでホームページなどで調べてみましたが、色々操作して実際に試してみないと理解できません。 現場で使用する前に操作を理解したほうが良いでしょう。 実際に使ってみて、multiwiiを使うための必需品だと思います。PCとワイヤーで繋がなくてもいいので確認や設定が非常に楽になります。 例として 1、コンパスキャリブレーション 2、プロペラを廻しながらの磁気コンパスへの影響の確認 3、飛行場での設定の変更やデータの確認 モーターを廻しながらのデーターの確認は線を繋いで確認することが出来ないので非常に有用です。 購入したモジュールはクラス2なので10mぐらいまでしか電波が届きません。電波が弱くなるとピ、ピ、ピと警告音がなります。それ以上、離れるとdisconnectされます。 Multiwii Bluetoothの設定
BACK
|