MULTICOPTERに挑戦(multiwii)2013/04/08~随時更新、訂正など行っています (更新2013/8/21 トライコプターのウィークポイントその2、その3を追加)2、トライコプター(tricopter) キットのクアッドコプターの製作でmultiwiiの設定や飛行方法などがつかめたので自分の機体を自作することにしました。
製作費用を安くあげるため、なるべく手持ちのパーツが使えモーターの数が少なくて済むトライコプターを製作することにしました。
バッテリーを手持ちの3セル1800mAh 35C、WAYPOINT 150MG サーボ、E-MAX BL2215-25 モーターが1つあったので
これを使ってトライコプターを製作することにしました。
キットのクアッドコプターの製作でmultiwiiの設定や飛行方法などがつかめたので自分の機体を自作することにしました。
製作費用を安くあげるため、なるべく手持ちのパーツが使えモーターの数が少なくて済むトライコプターを製作することにしました。
バッテリーを手持ちの3セル1800mAh 35C、WAYPOINT 150MG サーボ、E-MAX BL2215-25 モーターが1つあったので
これを使ってトライコプターを製作することにしました。トライコプターは逆ピッチのプロペラを使わなくても作ることができ、地元のラジコン屋さんでも購入できるので便利ですが、なかなかプロペラを決めることができませんでした。 バッテリー容量やモーターのKV値を考えると9インチのプロペラでピッチは4.5か4.7になります。モーターサイズが大きいのであまり弱いプロペラは使えないので APCのプロペラ 9×4.5Eとしましたがちょっと重すぎるのでマルチコプターには不向きかもしれませんがこれを使うことにしました。 アンプは20AでBEC容量があるものとすることを決めていましたが安価で気に入ったのがなかなか見つかりません。トライコプターはヘリのラダーサーボと同様にジャイロでがんがん電流を食うので妥協はできません。 HOBBY WING SKYWALKER 20A BEC2A,TWG 20A AL BEC2A,TURNIGY MULTISTAR 20A SBEC4Aを検討しました、信頼感ならHOBBYWINGですがリニアなコントロールとSBEC4AのMULTISTARにしました。 スペック ■フレーム 自作木製 ■モーター ■アンプ Turnigy Multistar 20A SBEC4A ■プロペラ ■フライトコントローラー CRIUS Multiwii SE V2.0 (firmware multiwii Ver 2.2に変更) ■サーボ ■受信機 ■CRIUS GPS CN-06 V2.0&CRIUS I2C NAV MODULE ■電飾用LED ■飛行重量 機体重量666g+バッテリー重量146g 合計812g(2013/6/1 現在) フレームの製作 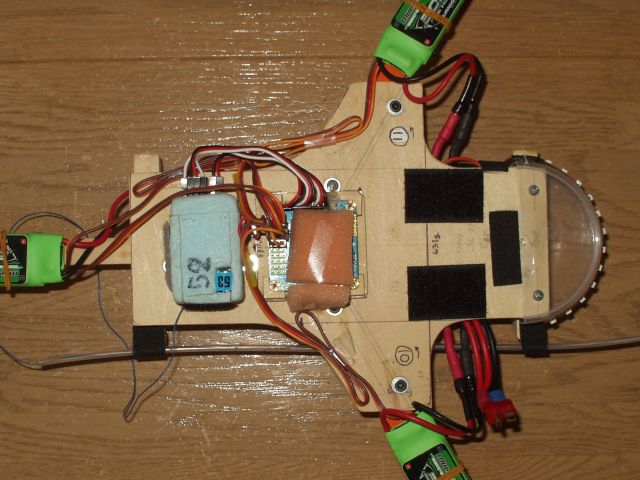

今回、前側のアームは折りたたみ式としましたが飛行中に動いてしますことがありました、簡単に動かないように固定する必要があります。 モーターの取付  モーターはタイラップ留めです。位置調整が簡単にできるので試作機には良い方法です。MAX BL2215-25モーターに付属するプロペラアダプターはO-RING留め用のアダプターなのでコレットアダプターを購入する必要があります。
2個は手持ちのアダプターを使いE-MAXのアダプターを1個購入しましたが購入したアダプターの品質が悪くセンターがなかなか出ません。以前購入し
て使っていなかったハイペリオン製のアダプターを使用することにしました。E-MAX製はプロペラシャフト径6㎜、ハイペリオン製は5㎜です。
モーターはタイラップ留めです。位置調整が簡単にできるので試作機には良い方法です。MAX BL2215-25モーターに付属するプロペラアダプターはO-RING留め用のアダプターなのでコレットアダプターを購入する必要があります。
2個は手持ちのアダプターを使いE-MAXのアダプターを1個購入しましたが購入したアダプターの品質が悪くセンターがなかなか出ません。以前購入し
て使っていなかったハイペリオン製のアダプターを使用することにしました。E-MAX製はプロペラシャフト径6㎜、ハイペリオン製は5㎜です。
YAWコントロール 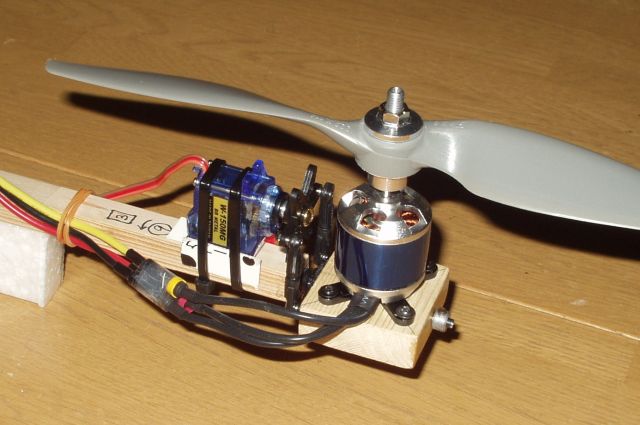 構造は100ドル TRICOPTERを参考に木片のモーターマウントとしました。シャフト軸は3㎜のピアノ線(ヘリのスタビライザー・バー)、ベアリングとして4㎜用のスペーサー(ローターのスペーサー)を使いました。
サーボは両引き(ヘリのボールリンケージ)でタイラップ留めです。モーターマウントと角棒の中心に穴を開けるのにバイスグリップを使い手で開けたので大変でした、わずかですが中心からそれましたが問題はありませんでした。
構造は100ドル TRICOPTERを参考に木片のモーターマウントとしました。シャフト軸は3㎜のピアノ線(ヘリのスタビライザー・バー)、ベアリングとして4㎜用のスペーサー(ローターのスペーサー)を使いました。
サーボは両引き(ヘリのボールリンケージ)でタイラップ留めです。モーターマウントと角棒の中心に穴を開けるのにバイスグリップを使い手で開けたので大変でした、わずかですが中心からそれましたが問題はありませんでした。フライトコントローラー(FC)の取付 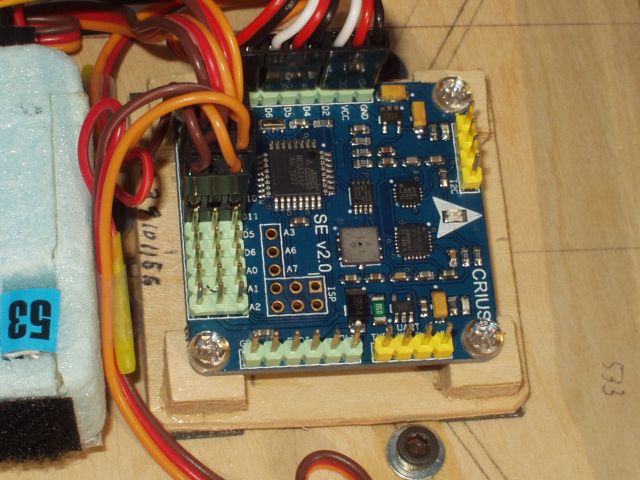 MULTIWII FLIGHT CONTROLLER(MWFC)は2.2mmの航空ベニヤでマウントプレートを作りバルサのマウントにプラスチックネジで留め、
マウントプレートをスポンジ両面テープで固定しています。
MULTIWII FLIGHT CONTROLLER(MWFC)は2.2mmの航空ベニヤでマウントプレートを作りバルサのマウントにプラスチックネジで留め、
マウントプレートをスポンジ両面テープで固定しています。取り付け位置はアームの中心点になるようにします。 config.hの設定 multiwii ver2.2のデフォルトから下記の行を変更します。QUADCOPTERとの違いはTRICOPTERの選択とTRICOPTERのYAW軸の方向の選択になります。 #define TRI #define HK_MultiWii_SE_V2 // Hobbyking board with MPU6050 + HMC5883L + BMP085 //#define I2C_SPEED 100000L //100kHz normal mode, this value must be used for a genuine WMP #define I2C_SPEED 400000L //400kHz fast mode, it works only with some WMP clones #define YAW_DIRECTION -1-------この行でサーボの動作方向を指定します。サーボの取り付け方により"1 or -1"の行を選びます。 #define RCAUXPIN8 #define MPU6050_LPF_42HZ------とりあえずラジコン技術どおりに選びました モーターARMの方法の設定変更 ラダー・ステック操作でモーターをARMにすることは危険です、サーボがフルに動くためプロペラが地面に接触する恐れがあります。 AUX SWを使ってモーターをARMにすれば安全にARMにできますがスロットル・スティックでARMにすることにしました。ROLL行を有効にして、YAW行を無効にします。 //#define ALLOW_ARM_DISARM_VIA_TX_YAW #define ALLOW_ARM_DISARM_VIA_TX_ROLL 送信機の設定 2013/5/4 追加&修正 (設定の仕方を詳しく記述した) 送信機はアクロ(飛行機モード)を選びます。データーがもし入っていればリセットして新規に設定していきます。受信機とMultiwiiとの配線は済ませておきます。FTDIでフライトコントローラーをパソコンと接続します。 multiwiiへの電源はUSBから供給されるのでサーボの配線は繋がないこと。(設定で動くと危ないのとUSBの許容電流(500mA )を超えないようにするため) winGUIを起動してスロットル、エレベーター(PITCH)、エルロン(ROLL)、ラダー(YAW)の各チャンネルの表示を見ながらまず正しい方向に動くか確認しリバース設定、次にスティック中立で"1500"になるようにサブトリムで調整します。最後にトラベル・アジャスト(エンド・ポイント)で最小値"1000"、最大値"2000"に設定します。 この順番が効率が良いです。Multiwiiを使う上での送信機の基本的な設定なので必ずきちんとこの値になるように設定します。 特にニュートラル1500は正確に合わせてください。ここでぴったりに合わせるとトリムしなくてもスロットルを上げるだけで真直ぐに上がります。 (FUTABA送信機のニュートラルは1520μsecなので必ず調整が必要です) JR送信機ではエルロンとラダーをREVにしました。FUTABA送信機ではエレベーターとスロットルをREVにしました。 (各CHの出力値はエレベーター ダウンで増加、エルロン 右で増加、ラダー 右で増加) 設定後、飛行機の感覚で舵が敏感だからと言って容易に設定を変更しないこと!! Multiwiiでは基本的に送信機側でD/Rやエクスポを入れません。トラベルが変わるとMultiwiiが正常に機能しなくなることがあります。舵の操作感を変更したい場合はMultiwiiのRC RATEやRC EXPOで調整します。 AUX1とAUX2の割り当て AUX1,AUX2 SWを操作して必要によりリバース設定、3ポジションSWの設定、トラベル・アジャスト(エンドポイント)の調整を行います。モーターのARMはスティック操作として、AUX1に3ポジションSW(FLAP SW CH6)を使い、midにACC、hiにHORIZONモードを割り当てました。AUX2は2ポジションSW(CH7)にHEAD FREEモードを割り当てました。 6CH,7CH共にREVに設定し、トラベルは100%でもSWの切り替えには問題ないのですが一応トラベル・アジャストを120%にしました。JR X2720送信機の場合、FLAP SWを使うにはFLAP SYSTEMでNORM、MID、LANDをそれぞれUP100、0、DWN100にセットしてSW操作によって働くようにします。 WinGUIで動きを確認 送信機の設定が終わったら次のことを確認します。プロポのスロットル・スティックを操作してモーターをARMにし3つのモーター出力が1000から1150なること、スロットルフルハイで3つとも約1850になること(重要、各CHのニュートラルを1500にキチンと合わせていないとバラバラになります)、エルロン/エレベーター・スティックを操作して 各モーター出力が正しくアップ・ダウンすることを確認すること。ラダー・スティックを操作してサーボ出力がニュートラルで1500、左に切った時max2000、右に切った時min1020を確認します。 ここでしっかり確認していれば初フライトであわてないで済みます。 ACC・MAGのキャリブレーションも行いジャイロ・ACC・MAG・BAROセンサーの動きも確認しましょう。 Turnigy Multistarアンプ(ESC)のキャリブレーション 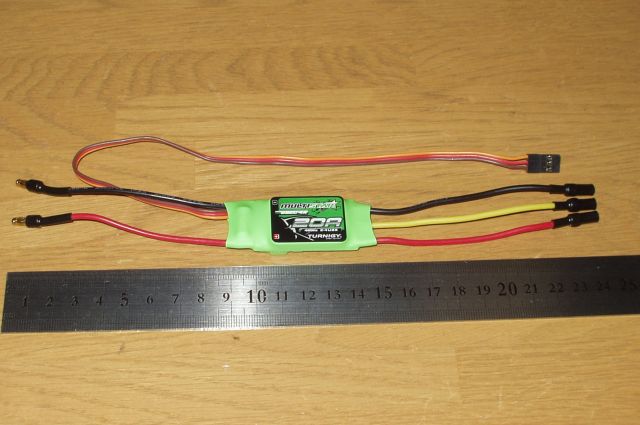 ①スロットル・レンジのキャリブレーション
①スロットル・レンジのキャリブレーション2013/5/4 ブレーキ設定について追加変更 送信機の設定、トラベルアジャスト(min=1000μs,hi=2000μs)を終わらせてから、キャリブレーションを行います。勿論、安全のため、プロペラは外して行います。 アンプを受信機のスロットルCHにつないで1個づつ、キャリブレーションを行う方法です。この方法が一番確実に設定を行うことができます。 Turnigy Multistar のスロットルのキャリブレーション方法はマニュアルに記載されていませが、他のメーカーのアンプと同様にスロットルフルハイで電源を接続してアイドルに戻す方法でキャリブレーションできました。 この場合、アンプの設定モードに入るビープ音(♪♪♪♪)が鳴る前にスロットルを戻します、接続して2秒後ぐらいが良いでしょう。ビープ音が鳴ってからではブレーキの設定の変更になります。 ただし、初めてキャリブレーションする場合はブレーキの設定の初期値が"ON"なので設定モードに入ったビープ音(♪♪♪♪)が鳴ってから戻します。 戻したときBEEP音が2回鳴ればブレーキはOFFです。ブレーキの変更操作でもスロットルのレンジのキャリブレーションは行われています。フルスロットルで電源を入れアイドルに戻す操作がキャリブレーションになっているようです。 再度キャリブレーションを行ったなどで、もしスロットルを戻したときにビープ音が1回しか鳴らない場合はブレーキはONなので、もう一度同じ操作をしてブレーキ設定を元にもどす必要があります。 ②アンプ(ESC)をフライトコントローラーに接続 このアンプのBECはスイッチングBECなので3個のアンプの1つからフライトコントローラーに電源を供給するようにします。2個のアンプから赤色の電源線をコネクターから外しシュリンクチューブで 絶縁してテープなどで固定します。電源は必ず1つのみにします。 ③Turnigy Multistar アンプ(ESC)の設定項目とデフォルトについて モーターを繋いでbeep音で設定できる項目は 1、Brake (OFF or ON) 2、Battery Type (Lixx or NiXX or LiFe) 3、Timing(AUTO or HI) (デフォルトは赤色) の3項目だけです、その他の設定はプログラム・カードが必要です。 デフォルトのバッテリー・タイプはリポ&リチウムイオンでカットオフ電圧は3.0V/セル(medium)です。タイミングはAUTOです。ブレーキはONです。 バッテリーをつないだとき、BEEP音が1回の時はブレーキONを示します。2回鳴った時はブレーキがOFFです。 HOBBYWINGなどの他のメーカーの製品はブレーキの初期値はOFFが多いのですがこの製品はONなので設定を変更した方が良いでしょう。 カットオフ電圧などもマルチコプター用と言いながら初期値がちょっと変ですね。 マルチコプター用に設計されたHOBBYWINGのSKYWALKER QUATTROの取扱説明書を読むとデフォルト設定はNiMHでカットオフ電圧はLOW(0%)になっています。 高価なマルチコプターを守るため、リポのプロテクションを設定するなと書かれています。実際にこのアンプを使用した機体がタイマーの入れ忘れでバッテリーを使いすぎて軟着陸した場面に 遭遇しました。この設定のおかげで無傷ですんでいます。 アクセレーションは"medium"になっています。これも変ですね。マルチコプターに使うなら"High"だと思うのですが。プログラム・カードが欲しくなります。 取扱説明書を読むとSunrise Modelの取扱説明書の内容とまったく同じです。OEM元はSunrise Modelかなと思います。ただこの製品と同じSBEC容量の製品はありません。 BECはSBEC 5.5V 4Aですが受信機への配線に通常付いているノイズフィルターが付いていません。ノイズは大丈夫なのかなとちょっと心配ですがいまのところ問題は出ていません。 配線の長さはコネクター部を含めて約280mmと長い物がついています。 SBECの電圧は5.5Vと少し高めの値です。マルチコプターに使うなら5Vの出力であれば良かったのですがFCのスペック上、許容範囲なのかちょっと心配なところもあります。 このアンプには3.5mmのコネクターがすでに取り付けられているので半田付けの必要が無く助かります。 バッテリー電源の配線 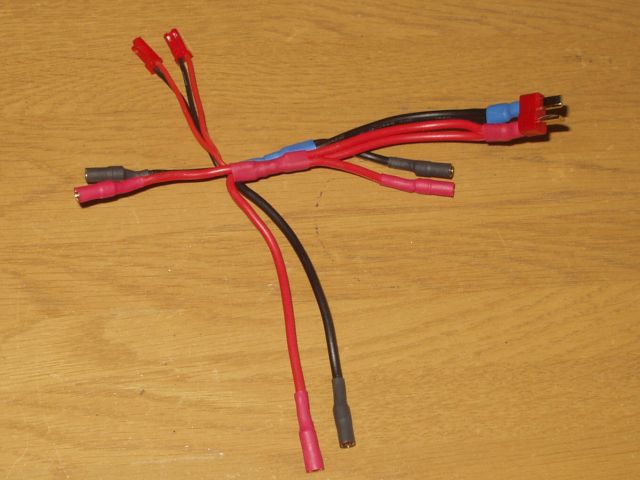 手持ちにシリコンワイヤーが無かったので通常の電線で製作しました。バッテリーと繋ぐ線は電流容量を増やすために2重にしています。
アンプに繋ぐ3.5mmのコネクターはモーターに付属してきたので新たに購入は必要ありませんでした。LEDの電源用にコネクターを2個別に取り付けています。
通常の電線を使ったので少し重くなり27gになりました。
作ってからわかりましたが左右のアンプに繋ぐ線が少し短くアームを折りたたむ時はコネクターを外さなければなりません。シリコンワイヤーで作り直すときにキチンとしたいと思っています。
手持ちにシリコンワイヤーが無かったので通常の電線で製作しました。バッテリーと繋ぐ線は電流容量を増やすために2重にしています。
アンプに繋ぐ3.5mmのコネクターはモーターに付属してきたので新たに購入は必要ありませんでした。LEDの電源用にコネクターを2個別に取り付けています。
通常の電線を使ったので少し重くなり27gになりました。
作ってからわかりましたが左右のアンプに繋ぐ線が少し短くアームを折りたたむ時はコネクターを外さなければなりません。シリコンワイヤーで作り直すときにキチンとしたいと思っています。
YAWサーボの動作方向の確認 YAWサーボの配線をmultiwiiに接続して動作確認をします。パソコンとの接続はしません。リポ・バッテリーを電源線に繋ぐかmultiwiiボードの空きコネクターに受信機用の4.8Vのバッテリーを接続してサーボの動作を確認します。 テールモーターを後ろから見て送信機のラダー・ステックを左に操作したとき右に傾くこと。このとき地面とプロペラとのクリアランスを確認すること。ニュートラルで真上を向くこと。(わずかに右でも良い)。 フレームのアーム部分にEPPの足をつけましたが少し短かったようでプロペラと地面とのクリアランスがあまり無く危険だったので送信機でラダーのD/Rを100%-80%に設定しました。(ラダーはモーターのARMには使わない設定で、サーボの動作だけなのでD/Rを設定しても問題ありません) TRICOPTERの重心位置 ネットで調べるとTRICOPTERの重心位置はアームの中心点になるようです、重心位置がQAUDCOPTERよりシビアだということなのでしっかり調整が必要です。 バッテリーの搭載位置やテール・アームの長さを調整して合わせます。 フライト 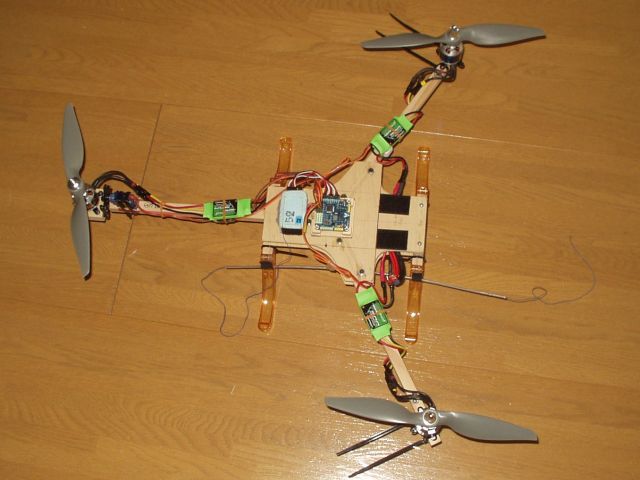

試作1号機は左右のモーター間の距離は約500mmで製作しました。フレームには100均で購入した洗濯ばさみで作った足をつけています。 初飛行のホバリングは安定せず、ジャイロだけではとてもホバリングが難しかったのですぐにACCモードに切り替えました。少し安定しましたがYAW軸が右方向に少しずつ回転していきます。アスファルトに着陸させると飛び跳ねて危険を感じ、すぐにフライトを切り上げました。1号機は失敗です。 試作2号機はアームを少し長い物に変更して安定を図ることにしました。左右軸間距離は約520mm、前後モーター軸間距離535㎜で、テールのアームをいっぱいに伸ばしてバランスの取れる長さとしました。 着陸で飛び跳ねる原因は洗濯ばさみで作った足に原因があり、モーターを揺すってみたら上下振動がしばらく続いてしまいます。取り除いて、アームの下にEPPブロックの足を取り付けることにしました。 ホバリングは1号機より安定していて、ジャイロだけでもホバリングできます。ただしクワッドコプターと比べるとやはり安定感はありません。 ACCモードに切り替えると右に廻っていくようなことは無くなりましたが、右に流れていきます。水平だとヘリと同様にテール・ローターの傾きにより流れるようです。 流れないようにするにはエルロン左のACCトリムが必要です。 ジャイロモードで上空飛行で走らせて見ましたが安定して飛びます。視力が悪いのと、慣れないこともあり向きがわからなくなるときがありました。 フライト後のバッテリーの残量は4分30秒のタイマーをセットしてアクロ無しの上空飛行を行い、50%以上残っています。 アンプのカットオフ電圧はデフォルトで3.0V/celのままなので余裕を持ったフライトを心がけています。 ・・・・現在フライト・テスト中・・・・・・ LEDライトの取付 
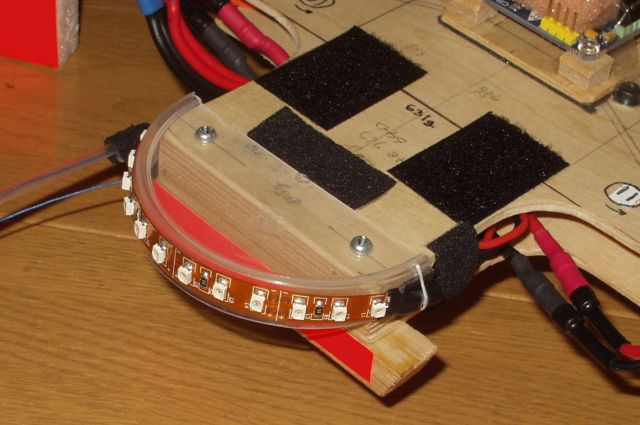
視認性を良くするため、前方に赤色LEDライトを取り付けました。丸いプラスチック製の容器をカットしてそれに貼り付けています。 曇り空で飛ばしましたが半円形に貼り付けているので前方1箇所でも視認性は良い物となっています。 このLEDはワールド・モデルスから発売されているLEDストラップでLED3個ごとに切り離すことができ、貼る場所に合わせてカットして使えます。 

CRIUS GPSの設定 その1 下記設定は初めてGPSを設定したときの方法で現在はやり方を変更しています。 CRIUS GPS CN-06 V2.0を設定する機会があったのでここにメモります。 GPSを取り付ける前にMultiwii FCのconfig.hをGPS対応に書き換えました。 multiwii ver2.2のconfig.hの変更箇所は4行です //#define GPS_BAUD 115200 ------シリアル接続の設定なので無効にします #define I2C_GPS #define MAG_DECLINIATION -7.1f ------私の地域の磁気偏角値です、 http://magnetic-declination.com/で調べます。 千葉や東京などは"-7f"ぐらいの値を入れます CRIUS GPSをI2C NAVボードでMultiwii SE V2.0に接続した場合、Multiwiiのconfig.hを書き換えるだけでは使用することが出来ません。 ネットで調べると①HOBBY ROBOT FACTORYさんと②AOさんのホームページに詳しく設定方法が書かれています。 ①HOBBY ROBOT FACTORYさんの方法ではGPSモジュールのパターンをジャンプする半田付け作業があります。私には細かな部分の半田付けは無理そうなので ②AOさんの書かれた方法で行うことにしました。 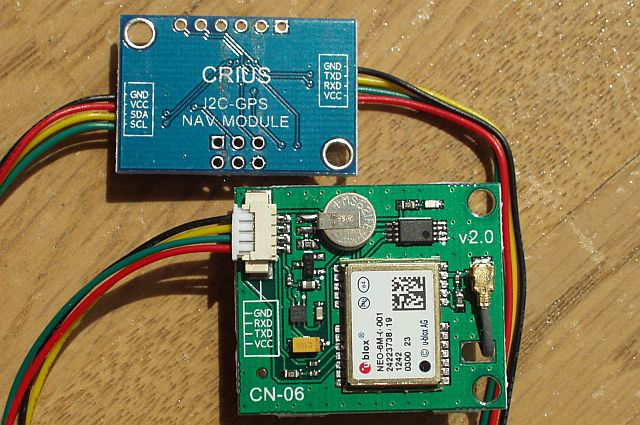
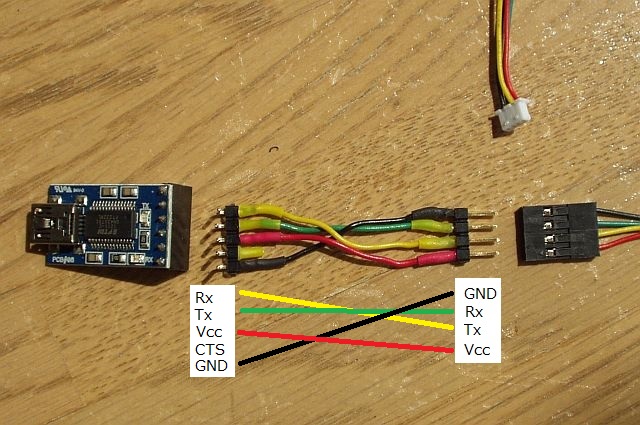
注意:このパーツはElectrostatic Sensitive Devices (ESD)&Moisture Sensitive Devices (MSD)です UBLOXのU-CENTER GPS 評価ソフトでGPSモジュールの設定をボーレート115200、リフレッシュレート5Hzに変更する方法です。 GPSモジュールとFTDIアダプターを接続するピン・アダプターが必要なので作りました。 AOさんのホームページを見ながら順番に設定を進めていきました。設定で失敗した点はU-CENTER日本語説明書を読まないでやったため GPSのボーレートを115200に変更した後、通信が途絶えたのを気が付かずにそのまま次の設定を行いました。画面の表示(データなど)が更新されていないので何かおかしいと思い 一旦GPSを外して再度接続した時、ここでやっとボー・レートを変更したことで表示が更新されなくなったことに気が付き再度設定をやり直しました。 U-CENTER日本語説明書を読んでいれば『通信情報』アイコンですぐに接続状態がわかっていたのに見落としていました。 設定後、GPSを再接続して設定が保持されていることを確認して設定の終了です。 この後、I2C NAV ボードに接続して通信されることを確認しました。 設定直後なのでGPSはホット・スタートで直ぐに受信状態が3D FIXになりI2C NAVボードのSTATUS LEDは速い点滅3回、1秒OFFを繰り返すようになりました。(もしLEDの点滅が1秒ON、1秒OFFをずっと繰り返すようであれば通信がうまくいっていないのでI2C NAV ボードのファーム・ウェアを書き換えるなどの対応が必要です) AOさんのホームページに書かれていたMultiwii FCの青色のstatus LEDはMultiwiiのバージョンが違うせいか点滅はしませんでした。 接続確認が出来たらwinGUIでreturn to homeとposition holdをAUX SWに設定してフライト・テストです (2013/6/25追記)設定方法を変更しました。詳しい設定方法は別のページに纏めましたのでI2C GPSの設定をお読みください。 CRIUS GPSの設定 その2 下記設定は初めてGPSを設定したときの方法で現在はやり方を変更しています。 前回設定したCRIUS GPS CN-06 V2.0受信機とCRIUS I2C GPS NAV MODULEと同じ物を「コスモテック」から購入しました。同じ製品なので前回と同様に GPS受信機のボー・レートとリフレッシュ・レートを変更するだけで使用できると思っていましたが残念ながらできませんでした。I2C NAVボードのステータスLEDはゆっくりした点滅のままです。 ボー・レートを115200、9600、38400と変更して試してみましたがダメでした。GPS受信機(115200BPS)は前回使ったI2C NAVボードに繋ぐと正常に働きます。 I2C NAVボードのファームウェアの書き換えが必要なようです。 HOBBY ROBOT FACTORYさんのCRIUS GPSの接続 に従って"I2C GPS NAV latest.rar"(オリジナル)をダウンロードしてI2C NAVボードを書き換え、U-CENTER GPS 評価ソフトでGPS受信機のボー・レートとリフレッシュ・レートを38400bps,5Hzにしましたが、働きません。ダウンロードしたファイルはver2.1用で私のFCはmultiwii ver2.2なのでダメなのでしょうか? (2013/5/22追記 後でconfig.hを開いてみたらオリジナル版(左側のリンク)はボーレートが9600でした。これでは無理ですね。hobby robot factory版(右側のリンク)は38400でした。) i2c-gps-navのArduino based GPS and NAV co-processor with I2C protocolから最新のファイルをダウンロードして 書き換えました。ファイル名は"I2C GPS NAV V2.2 Beta1 (R62)"です。 rar圧縮ファイルの為、解凍ソフトが必要です。今回は”Lhaplus”をネットからダウンロードして解凍しました。 GPS受信機のボー・レートとリフレッシュ・レートを38400bps,5Hzに変更して接続したところI2C NAVボードのステータスLEDはゆっくりした点滅から早い点滅に変わりました。 正常に働いたようです。winGUIでもMAPにデーターと自宅が表示されました。 このあとボーレートを115200bpsでも使えるか変更して試してみましたがダメでした。ダウンロードしたファームウェアをそのまま使う場合は38400bps以外はダメなようです。 I2C NAVボードのファームウェアの書き換えを行いましたが、書き換え終わったときエラーが出て何回かやり直しました。ピンを差し込んで抑えるだけなのでうまく接触しなかったことが原因です。 抑え方を変えて3回目にエラーが無く書き換えることが出来ました。ちょっとコツがいるので面倒でした。 同じメーカーのボードでも書き換えの必要が無いものと書き換えなければ使えないボードがあるのは困ったものです。また一つmultiwiiのハードルが高くなります。 (2013/5/22追記)今回、仕方なくI2C NAVボードのファームウェアを書き換えましたが、疑問が浮かんできます。CRIUS GPS CN-06 V2.0受信機はEEPROMを使っているのでU-CENTER GPS 評価ソフトでGPS受信機のボー・レートを115200に変更すれば 電源が無くなっていてもボーレートが保持されます。古いV1.Oの受信機はEEPROMがなかったので変更しても時間がたつと初期値の9600に戻ります、そのためモジュールのピンをジャンプしてボーレートの初期値を強制的に38400にする処置が考え出されました。 CRIUS GPS CN-06 V2.0受信機の場合、I2C NAVモジュールのファームウェアの設定で115200を最初から読み込むように設定すればGPSモジュールのボーレートを38400bpsにする必要がないのではないのか? また、config.hの内容を変更をしないでデフォルトのまま使っていますが、UBLOXを有効にしていないので115200bpsで働いていないのではないのか? ファームウェアの変更ヶ所などが詳しく分からないので次回設定の変更をするようなときがあったら調べて試してみたいと思います。とりあえず働いているのでこのまま使おうと思います。 (2013/6/5追記)いろいろ調べていくと"I2C GPS NAV V2.2 Beta1 (R62)"はGPSボーレート設定のプログラムが変更されUBLOXを有効にするとconfig.hで指定したボーレートに自動的になるようです。 確認はしていませんがU-CENTERでボーレートを変更する必要が無くなるようです。今回、デフォルトのまま使ったので38400bpsのまま変更はされていないと思います。 (2013/6/20追記)"I2C GPS NAV V2.2 Beta1 (R62)"にUBLOXプロトコルを使ったとき不具合があり、STATUS LEDの点滅の仕方にも不具合があることが分かっていました。同じサイトから正規プログラムでない修正したプログラムを見つけたのでので CRIUS I2C GPS NAV MODULEのファームウェアを置き換えました。GPSの設定は38400bps,5HzのままでI2C GPS NAVのconfig.hをUBLOX,115200にしました。GPSの受信も正常に行われています。 (2013/6/25追記)設定方法を変更しました。詳しい設定方法は別のページに纏めましたのでI2C GPSの設定をお読みください。 GPSでRETURN TO HOMEのテスト 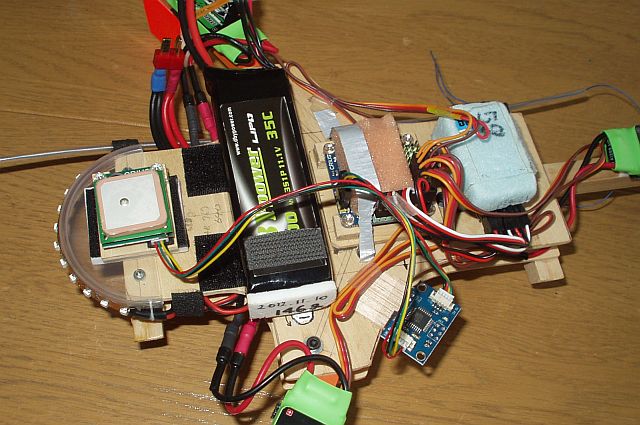 フライトではGPSサテライトが5個以上受信されFIXしたことを示すI2C NAV ボードのLEDが速い点滅(速い点滅3回、1秒OFF)になったのを確認してからフライトです。(フライト前に必ず確認すること)
フライトではGPSサテライトが5個以上受信されFIXしたことを示すI2C NAV ボードのLEDが速い点滅(速い点滅3回、1秒OFF)になったのを確認してからフライトです。(フライト前に必ず確認すること)GPSを取り付けてフライト・テストです。風は2-3m/s程度、離陸して10メートルぐらい離してSW ON、機体は離陸地点に機首を向けてゆっくり向かっていきます。 少し揺れています。離陸地点で機首を離陸時の方位に向けて止まりました。横風を受けてのホバリングです。機体はゆらゆら揺れていますがだいたいの位置を保持しています。 高度は多少の変化はありますがほぼ一定しています。 ポジション・ホールドのテストからやる方が良いのですがmultiwii V2.2の精度がよいことが分かっていたのでRETURN TO HOMEを行いました。GPSのフライト・テストは成功です。 ただし、自作の機体の方は重たいプロペラを使っていてACCモードの調整をまだしていしていないこともあり、少し揺れてピタリと止まることがなかったのでPID設定の変更が必要かと感じました。 GPSを使っての感想は機体を離して飛ばすような飛行では必需品になると思います。機体の向きが分からなくなり離れていってもスイッチを入れるだけで自分の所へ戻ってくるので安心です。 風のある日は特に助かります。ただあまり過信して強い風の中で飛ばすのは危険です。風に負けて戻ってこれない恐れがあるので注意が必要です。 (追記2013/6/6 現在のAUX SWの設定はAUX1にHORIZON MODE、AUX2にPOSI HOLDとRETURN TO HOMEを設定しています) 808 #18 カメラで空撮のテスト(2013/4/17記述)  クラブ仲間から超小型の808 #18 カメラを借りて空撮テストです。機体上面にスポンジテープを貼り、その上にマジックテープでカメラを取り付けました。
前回製作したクワッドコプターに搭載した映像を見たとき振動が多く画面が大きくゆらゆら揺れて視聴に耐えられませんでしたが、この機体ではそれほど大きな揺らぎもなく視聴することができました。
上空でホバリング後、降下させるとプロペラ後流に入るため、機体の振動と大きな揺れがありました。映像と音声が記録されるので機体の状態が良くわかります。
搭載方法はジンバルを使わない簡単な方法のため、トライコプターの性格上、ホバリングでは機体を傾けて静止させなければなりません。そのため映像も
傾いたものとなります。機体を走らせると前傾するので地面を映すことになります。良い映像を撮ろうと思ったら、ジンバルシステムと振動対策が必要なようです。
撮影はジャイロモードで行いました。
クラブ仲間から超小型の808 #18 カメラを借りて空撮テストです。機体上面にスポンジテープを貼り、その上にマジックテープでカメラを取り付けました。
前回製作したクワッドコプターに搭載した映像を見たとき振動が多く画面が大きくゆらゆら揺れて視聴に耐えられませんでしたが、この機体ではそれほど大きな揺らぎもなく視聴することができました。
上空でホバリング後、降下させるとプロペラ後流に入るため、機体の振動と大きな揺れがありました。映像と音声が記録されるので機体の状態が良くわかります。
搭載方法はジンバルを使わない簡単な方法のため、トライコプターの性格上、ホバリングでは機体を傾けて静止させなければなりません。そのため映像も
傾いたものとなります。機体を走らせると前傾するので地面を映すことになります。良い映像を撮ろうと思ったら、ジンバルシステムと振動対策が必要なようです。
撮影はジャイロモードで行いました。
手持ちの部品を使って安くマルチコプターを製作することを考えてモーターが一つ少ないトライコプターとしましたが1から部品を揃えた場合、製作経費はクワッドコプターとそれほど変わりません。 初めてマルチコプターを製作するのであれば作りやすさと安定性からクワッドコプターの方が良いでしょう。 トライコプターは製作が少し面倒ですがYAWコントロールの方法や機体の作り方などいろいろ工夫することができるのでこれも一つの楽しみ方になると思います。 ネットの機体を見るともう少し大きい機体が多く安定性では大きいほうが良いようです。TRICOPTERの標準的なサイズはどいのくらいなのか、 PIDを変更しなくも飛ばせる機体サイズ/モーターやプロペラなどの機体構成がわかると作りやすいのですが、まだまだ満足のいく機体にはなっていません。、 調整など・・・ 2013/5/4 記述 飛行を繰り返し行っていますが今のところPIDの変更は2箇所のみです。 地上に置いてラダー操作でYAWサーボを動かしたときハンチングが起きるようになりました。機体を持ち上げるとハンチングは収まります。 飛行中はハンチングはありませんがYAWのP値を少しだけ下げました。 GPSのRTH時、ゆらゆら揺れながら飛行しているのでLEVELのP値を少し下げました。 風の中をジャイロモードでホバリングや飛行させていますが非常に安定は良いと感じます。プロペラがAPCのEペラで強度があり重たいのも風に対して良いようです。 しばらくこのままで飛ばせそうです。 トラブル・・・ 2013/5/10 記述ー5/17追加 ①ジャイロモードで上空を走らせていたところ、コントロールが少し変です。頭を下げ姿勢が崩れて行きます。落ちて行きそうになったので慌ててACCモードをON, RTHモードで機体を戻してましたが、フラフラ戻ってきます。すぐに着陸させて機体を見たところ前側のアーム1本が後ろにずれています。危ないところでした。 チェックしたところ締め付けが緩くなり軽くアームが動く状態になっています。ベニヤでアームを挟む構造なので振動で痩せて緩くなったようです。折りたためる構造にしていましたが普段、折りたたまずに使っていたので緩くなっているのを気が付きませんでした。製作したとき緩くなるかもしれないのでピンを入れるようにしようかと思っていましたがそのままにしていました。ネジを1本打ち動かないように固定することにしました。 他の部分のボルトの締め具合も確認したところ緩くなっていたので締め付けました。木製なのでときどき点検が必要です。 ②地上でサーボを動かしたときガクガクした変な揺れ方をして動きます。ときどきハンチングも起こります。機体を組み立てたときにはこのような症状は無く、 どこが悪いのかサーボを動かしてチェックしましたがなかなか分かりません。サーボを抑えてモーターを揺するとサーボケースの上蓋が動くではありませんか。ケースのネジが緩んでいます。 ネジを締めてチェックするとスムーズに動きます。タイラップ止めなのでネジが緩みやすいようです。時々点検が必要です。 (追記)地上でサーボのハンチングが頻繁に起こるようになりました。サーボが・・・・ ③バッテリーをつないだ後、フライト前にYAWサーボのテストをしたときYAWサーボの反応が非常に悪かったり、まったく動かないときがあり、バッテリーをつなぎ直すと正常に作動することがありました。 CPUがコントロールしているのでバッテリーをつなぐときのノイズなどでこのようなことが起こるのかと思っていましたが、機体を手で動かすとYAWサーボは働いています。FCの青色のステータスLEDは消灯のままです。 どうも受信機が悪いようです、受信機をFrSKYの2.4Gに変更しました。(もちろん送信機も変更です) 飛行機のような動翼が無いのでプリフライト・チェックで確認できるのはこれだけです。離陸前には必ずYAWサーボが正常に動くか確認が必要です。 ④墜落(2013/7/28) 2013/8/21 記述 カーボン・プロペラを付けてテスト・フライト中プロペラがアダプターごと飛んで行き墜落してしまいました。 左前のプロペラは逆ピッチのプロペラだったのでこれが緩んで墜落したと思いましたが正ピッチの右前のプロペラでした。モーターの振動もあり緩んだようですが締め付けトルクも弱かったようです。 トライコプターのウィークポイント その1 YAWサーボ 2013/6/12 記述 地上でハンチングが頻繁に起こるようになりました。浮いてしまえばハンチングは止まるので飛行には問題ないと考えていましたが ラダーを左側に切った時、サーボの動きがギクシャクして動きます。右に切ったときはスムースに動きます。 受信機のラダーCHに直接サーボを接続して動かしても同じです。サーボのポテンショメーターがいかれてきたようです。 トライコプターの製作を決めたとき、機械的に動くYAWサーボが一番壊れやすいだろうと思っていましたが2ヶ月程度のフライトであまりにも早くいかれてしまいました。 予備のサーボに交換しましたがまた、すぐにいかれそうです。とりあえずYAWのP値をもう少し下げて様子を見たいと思います。 もう少しトルクが大きく振動に強いサーボが必要なようです。 2013/8/21 記述 プロペラを軽量のカーボン・プロペラに交換しました。これによりサーボの負荷が軽減できると思います。YAWのP値を4.3まで下げました。 左前側のぺラを逆ピッチにしたのでYAW方向のトリムが軽減されるので良い方向に働いているようです。 その2 プロペラ・アダプター 2013/8/21 記述 コレット式プロペラ・アダプターを使用していますがフライト中に緩んだときに簡単にプロペラが飛んでしまいます。気にしていましたが先日、フライト中にプロペラが飛んで墜落してしまいました。 モーターのベアリングが傷んでいるようで異音がしていたので振動で緩んだようです。 逆ピッチのプロペラをつける場合はプロペラが動くとナットが緩む方向に力がかかるので締め付けトルクはしっかり締める必要があります。 締め付けトルクの確認が必要です。本当はプロペラ・シャフトがモーター直付けなら少しは安心できるのですが。 その3 振動とモーター 2013/8/21 記述、8/26修正 前側2個のモーターの振動が大きいのでベアリングがいかれと思い交換することにしました、いかれ易い内側のベアリングを交換しましたが モーターを手で廻すと同じところでカツカツと異音がします。ベアリングだけの問題では無いようです。ローターのマグネットとステーターが当たっているかと思い、ステーターに錆びも発生していたので ステーターを少し削ることにしました。ローターを他のモーターと入れ替えたりして最終的に1個は異音が無くなり再使用することができましたが1個は新しいモーターに交換しました。 ステーターを削ったりしましたがこれは関係なかったようです。 ベアリングが明らかにいかれている物もありましたがベアリング交換で直らないのは参ります。プロペラのバランス、モーター・バランスのチェックをしっかりして振動を減らさなければだめですね。 APCのEぺラは重たいのでキチンとバランスが取れればよいのですが振動に不利です、マルチコプターには適さないと言えます。モーターから異音がでたまま飛ばしていても良い気がしません。プロペラが飛んで墜落したこともあり振動対策は重要です。 飛行機を作ったときは必ず地上でフルパワーでのテストをしていましたがマルチコプターはモーターが多いので省略していました。フライトでフルパワーを出すと振動が出ていたのでフルパワーを出さない飛ばし方をしていましたがこれが良くなかったようです。 最終的にモーターを1個づつテストランして振動が減ったことを確認後、プロペラを付けフルパワーでテストランし振動を確認して良しとしました。プロペラシャフトとプロペラには僅かですがガタがあったのでプロペラの締め付け方一つで振動がでたりするので単体での確認が必要です。 飛行写真 

TRICOPTERの改修につづく・・・
BACK ・ NEXT
|