MULTICOPTERに挑戦(multiwii)2013/06/12 NEW4、CRIUS Multiwii Lite & I2C接続外付けセンサー設定メモ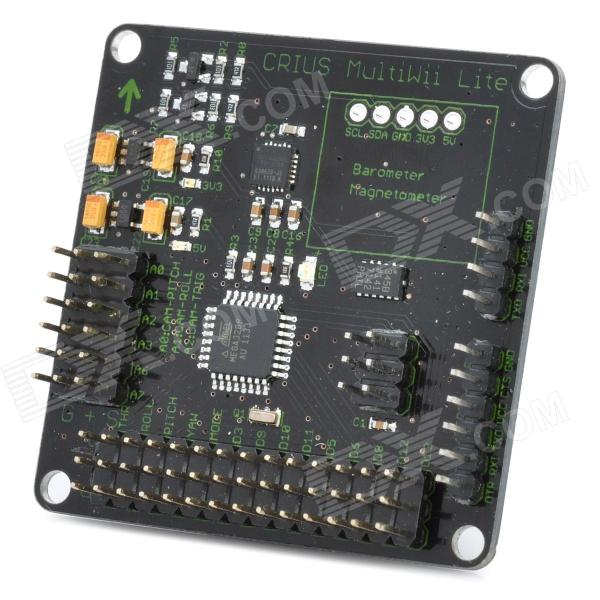
 CRIUS Multiwii Lite(旧バージョン)スペック
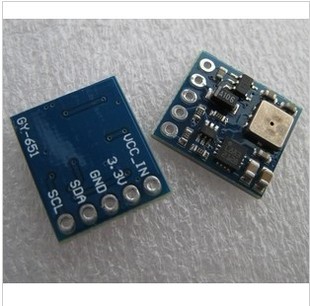
CRIUS Multiwii Lite(旧バージョン)スペック・ATMEGA328P microcontroller ・ITG3205 three-axis digital gyroscope ・ADXL345 three-axis acceleration sensor ・I2C PORT(5V/3.3V/GND/SDA/SCL) など 外付け磁気・気圧センサー GY-651 スペック 磁気センサー:HMC5883L 気圧センサー:BMP085 CRIUS Multiwii Lite(旧バージョン)に磁気、気圧外付けセンサー(GY651)を取付、ラジコン技術2013年1月号の記事に基づき設定したのでめもります。 config.hの書き換え I2C接続の気圧センサーBMP085と磁気センサーHMC5883Lを有効にして磁気センサーの向きを”individual sensor orientation”で指定します。 Multiwii 2.2の変更箇所は下記のようになります。 /************************** The type of multicopter ****************************/ #define QUADX /********************************** I2C speed ************************************/ //#define I2C_SPEED 100000L //100kHz normal mode, this value must be used for a genuine WMP #define I2C_SPEED 400000L //400kHz fast mode, it works only with some WMP clones /*************************** Combined IMU Boards ********************************/ #define CRIUS_LITE // Crius MultiWii Lite /*************************** independent sensors ********************************/ /* I2C barometer */ #define BMP085 /* I2C magnetometer */ #define HMC5883 /* individual sensor orientation */ #define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -X; magADC[PITCH] = -Y; magADC[YAW] = -Z;} /******************************** ARM/DISARM *********************************/ //#define ALLOW_ARM_DISARM_VIA_TX_YAW #define ALLOW_ARM_DISARM_VIA_TX_ROLL-----墜落時すぐにモーターをカットできるようにスロットル・スティックにします /********************************* Aux 2 Pin ***********************************/ #define RCAUXPIN8 /********************* Lowpass filter for some gyros ****************************/ #define ITG3200_LPF_42HZ /**************************************************************************************/ /*********************** GPS **************************/ /**************************************************************************************/ //#define GPS_BAUD 115200 ------FCへの接続方法がシリアルでないので無効にします #define I2C_GPS #define MAG_DECLINIATION -7.1f ------私の地域の磁気偏角値です センサーの向きの確認方法 ラジコン技術によると磁気センサーの値は基板を動かしたとき、下記のように変化します。 ①基板を右に傾ける MAG ROLLの値が増える MAG Z(YAW)の値が減る ②基板を前側に下げると MAG PITCHの値が増える MAG Z(YAW)の値が減る ③基板が水平に置かれているとき MAG Z(YAW)の値がプラスになっている 上記のようになるように”sensor orientation”にマイナス符号をつけます I2C GPSの取付 (2013/6/27追記) 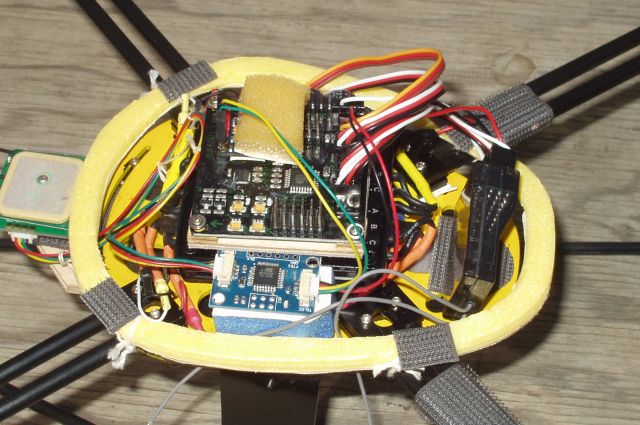 I2C接続のGPSを取り付ける場合、外付けセンサーを取り付けたI2Cポートにパラレルに接続することができます。I2Cポートのピンの長さに余裕があればI2C GPS NAV MODULEからのピンを差し込むことができます。
ピン配列が異なるのでI2C GPS NAV MODULEの4ピンのコネクターをI2C PORTにそのまま取り付けることが出来ません。
コネクターからピンを取り外しSDAとSCLの2つピンを一つのコネクターにして外付けセンサーが付いているI2C PORTに差し込みます。VCC(5V)とGNDのピンをもう一つのコネクターとして5Vを取り出せる空いているポート(D5、D6など)に接続します。
I2C接続のGPSを取り付ける場合、外付けセンサーを取り付けたI2Cポートにパラレルに接続することができます。I2Cポートのピンの長さに余裕があればI2C GPS NAV MODULEからのピンを差し込むことができます。
ピン配列が異なるのでI2C GPS NAV MODULEの4ピンのコネクターをI2C PORTにそのまま取り付けることが出来ません。
コネクターからピンを取り外しSDAとSCLの2つピンを一つのコネクターにして外付けセンサーが付いているI2C PORTに差し込みます。VCC(5V)とGNDのピンをもう一つのコネクターとして5Vを取り出せる空いているポート(D5、D6など)に接続します。ピンの長さが短いときは取り付け方に工夫(半田付けなど)が必要なのでシグナルと電源は分割する方が良いでしょう。
BACK ・ NEXT
|