回転の表す単位ベクトル
1 原点の回りの角 $\theta$ の回転の表す単位ベクトル
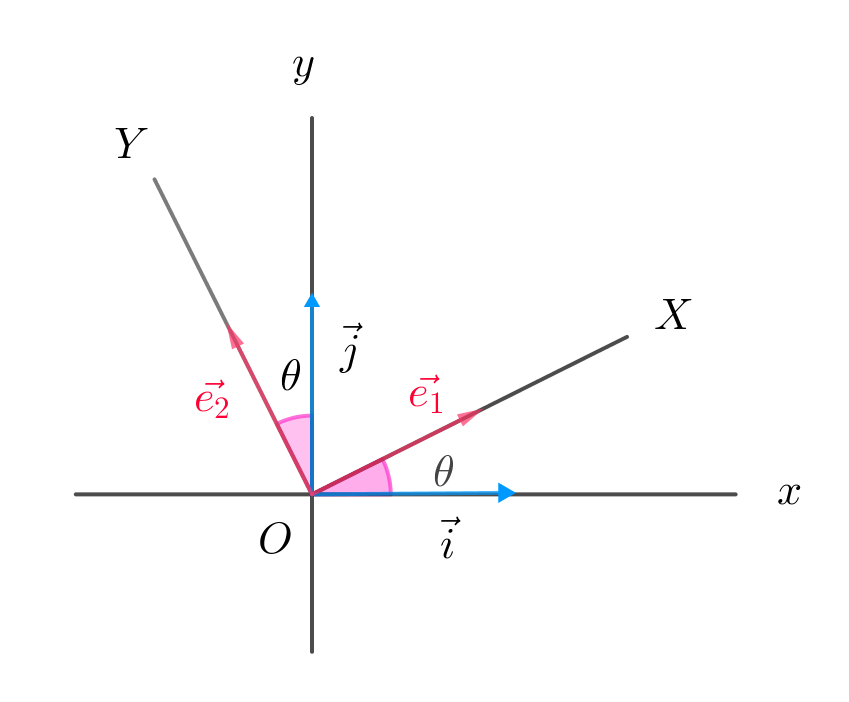
$原点の回りに角 \ \theta \ 回転させた軸を \ X\ 軸,\ Y\ 軸とし、$
$それらの単位ベクトルをそれぞれ \ \vec{e_1}_,\ \vec{e_2}\ とすると$
$\quad \vec{i}\cdot \vec{e_1}=\cos \theta$
$\quad \vec{j}\cdot \vec{e_1}=\cos (\cfrac{\pi}{2}-\theta)=\sin \theta$
$\quad \vec{i}\cdot \vec{e_2}=\cos (\cfrac{\pi}{2}+\theta)=-\sin \theta$
$\quad \vec{j}\cdot \vec{e_2}=\cos \theta$
$平面上の任意のベクトルは一次独立な \ 2\ つのベクトルを用いて線形結合で表されるから$
$\quad \vec{e_1}=k\ \vec{i}+l\ \vec{j} \quad (k,\ l \ は実数)\ \ とおける$
$両辺に\ \vec{i}\ をかけて \qquad \vec{i} \cdot \vec{e_1}=k\ \vec{i} \cdot\vec{i}+l\ \vec{i} \cdot \vec{j} \qquad \cos \theta =k$
$両辺に \ \vec{j}\ をかけて \qquad \vec{j} \cdot \vec{e_1}=k\ \vec{j} \cdot\vec{i}+l\ \vec{j} \cdot \vec{j} \qquad \sin \theta =l$
$よって \quad \vec{e_1}=\cos \theta \ \vec{i}+\sin \theta \ \vec{j} $
$同様にして \quad \vec{e_2}=m\ \vec{i}+n\ \vec{j} \quad (m,\ n \ は実数)\ \ とおけるから$
$両辺に\vec{i}をかけて \qquad \vec{i} \cdot \vec{e_2}=m\ \vec{i} \cdot\vec{i}+n\ \vec{i} \cdot \vec{j} \qquad -\sin \theta =m$
$両辺に\vec{j}をかけて \qquad \vec{j} \cdot \vec{e_2}=m\ \vec{j} \cdot\vec{i}+n\ \vec{j} \cdot \vec{j} \qquad \cos \theta =n$
$よって \quad \vec{e_2}=-\sin \theta \ \vec{i}+\cos \theta \ \vec{j} $
$逆は$
$\quad \vec{i}=p\ \vec{e_1}+q\ \vec{e_2} \quad (p,\ q \ は実数)\ \ とおけるから$
$両辺に\vec{e_1}をかけて \qquad \vec{i} \cdot \vec{e_1}=p\ \vec{e_1} \cdot\vec{e_1}+q\ \vec{e_2} \cdot \vec{e_1} \qquad \cos \theta =p$
$両辺に\vec{e_2}をかけて \qquad \vec{i} \cdot \vec{e_2}=p\ \vec{e_1} \cdot\vec{e_2}+q\ \vec{e_2} \cdot \vec{e_2} \qquad -\sin \theta =q$
$よって \quad \vec{i}=\cos \theta \ \vec{e_1}-\sin \theta \ \vec{e_2}$
$同様にして \quad \vec{j}=r \vec{e_1}+s\ \vec{e_2} \quad (r,\ s \ は実数)\ \ とおけるから$
$両辺に\vec{e_1}をかけて \qquad \vec{j} \cdot \vec{e_1}=r\ \vec{e_1} \cdot\vec{e_1}+s\ \vec{e_2} \cdot \vec{e_1} \qquad \sin \theta =r$
$両辺に\vec{e_2}をかけて \qquad \vec{j} \cdot \vec{e_2}=r\ \vec{e_1} \cdot \vec{e_2}+s\ \vec{e_2} \cdot \vec{e_2} \qquad \cos \theta =s$
$よって \quad \vec{j}=\sin \theta \ \vec{e_1}+\cos \theta \ \vec{e_2}$
$まとめると$
$\qquad \vec{i},\ \vec{j}\ と\ \vec{e_1},\ \vec{e_2}\ の変換公式$
$\hspace{3em} \vec{e_1}=\cos \theta \ \vec{i}+\sin \theta \ \vec{j} , \quad \vec{e_2}=-\sin \theta \ \vec{i}+\cos \theta \ \vec{j} $
$\hspace{3em} \vec{i}=\cos \theta \ \vec{e_1}-\sin \theta \ \vec{e_2}, \quad \vec{j}=\sin \theta \ \vec{e_1}+\cos \theta \ \vec{e_2}$
2 回転した軸からみたベクトルの成分
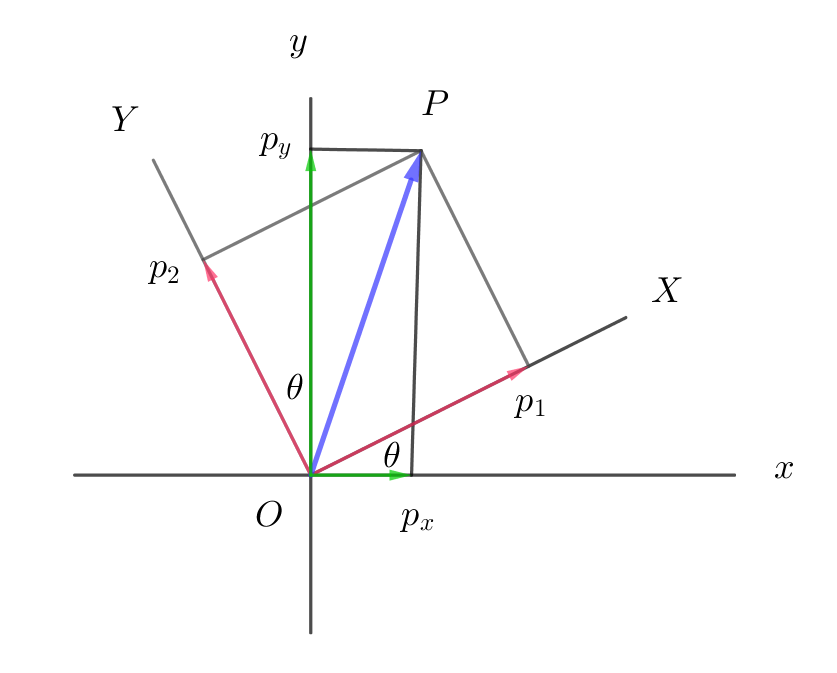
\begin{eqnarray*} \vec{p}&=&p_x\ \vec{i}+p_y\ \vec{j}\hspace{5em}\\ &=&p_x(\cos \theta \ \vec{e_1}-\sin \theta \ \vec{e_2})+p_y(\sin \theta \ \vec{e_1}+\cos \theta \ \vec{e_2})\\ &=&(p_x\cos \theta + p_y\sin \theta)\vec{e_1}+(-p_x\sin \theta +p_y\cos \theta)\vec{e_2}\\ \end{eqnarray*} $よって、\vec{p}\ を\ X,\ Y\ 座標軸で表したときの成分を \ (p_1,\ p_2)\ とすると$
$\qquad p_1=p_x\ \cos \theta + p_y\ \sin \theta$
$\qquad p_2=-p_x\ \sin \theta +p_y\ \cos \theta $
$逆は$
\begin{eqnarray*} \vec{p}&=&p_1\ \vec{e_1}+p_2\ \vec{e_2}\\ &=&p_1(\cos \theta \ \vec{i}+\sin \theta \ \vec{j})+p_2(-\sin \theta \ \vec{i}+\cos \theta \ \vec{j})\\ &=&(p_1\cos \theta - p_2\sin \theta)\ \vec{i}+(p_1\sin \theta +p_2\cos \theta)\ \vec{j}\\ \end{eqnarray*} $よって、\vec{p}\ を\ x,\ y\ 座標軸で表したときの成分を \ (p_x,\ p_y)\ とすると$
$\qquad p_x=p_1\ \cos \theta - p_2\ \sin \theta$
$\qquad p_y=p_1\ \sin \theta + p_2\ \cos \theta $
メインメニュー に戻る